

Dokumentace skutečného stavu kolektorové galerie za využití metody 3D laserového skenování
Partneři sekce:
Závratný rozvoj nových technologií nám v současné době umožnuje stále dokonalejší zachycení skutečného stavu konstrukcí. Je až nepředstavitelné, jaké možnosti se nám otevírají. Tento jev je možné sledovat v každé oblasti, a to nejen ve stavebnictví. Od diagnostiky staveb a konstrukcí, geotechniky, geofyziky až po geodetické práce se čím dál častěji používá technologie 3D laserového skenování (3D laser scanning).
Metoda skenování zaručuje nejenom požadovanou přesnost, zejména při dokumentaci skutečného stavu konstrukce, ale umožňuje také opakovatelnost měření, která je například při monitoringu staveb nebo případných soudních sporech více než žádoucí.
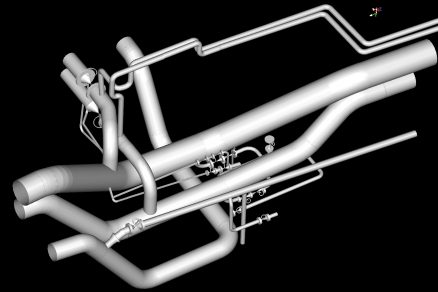
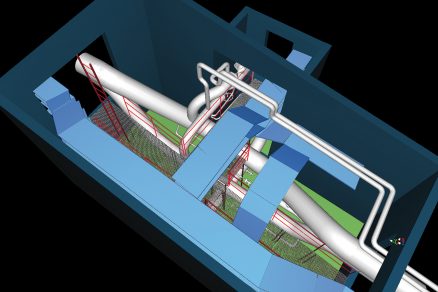
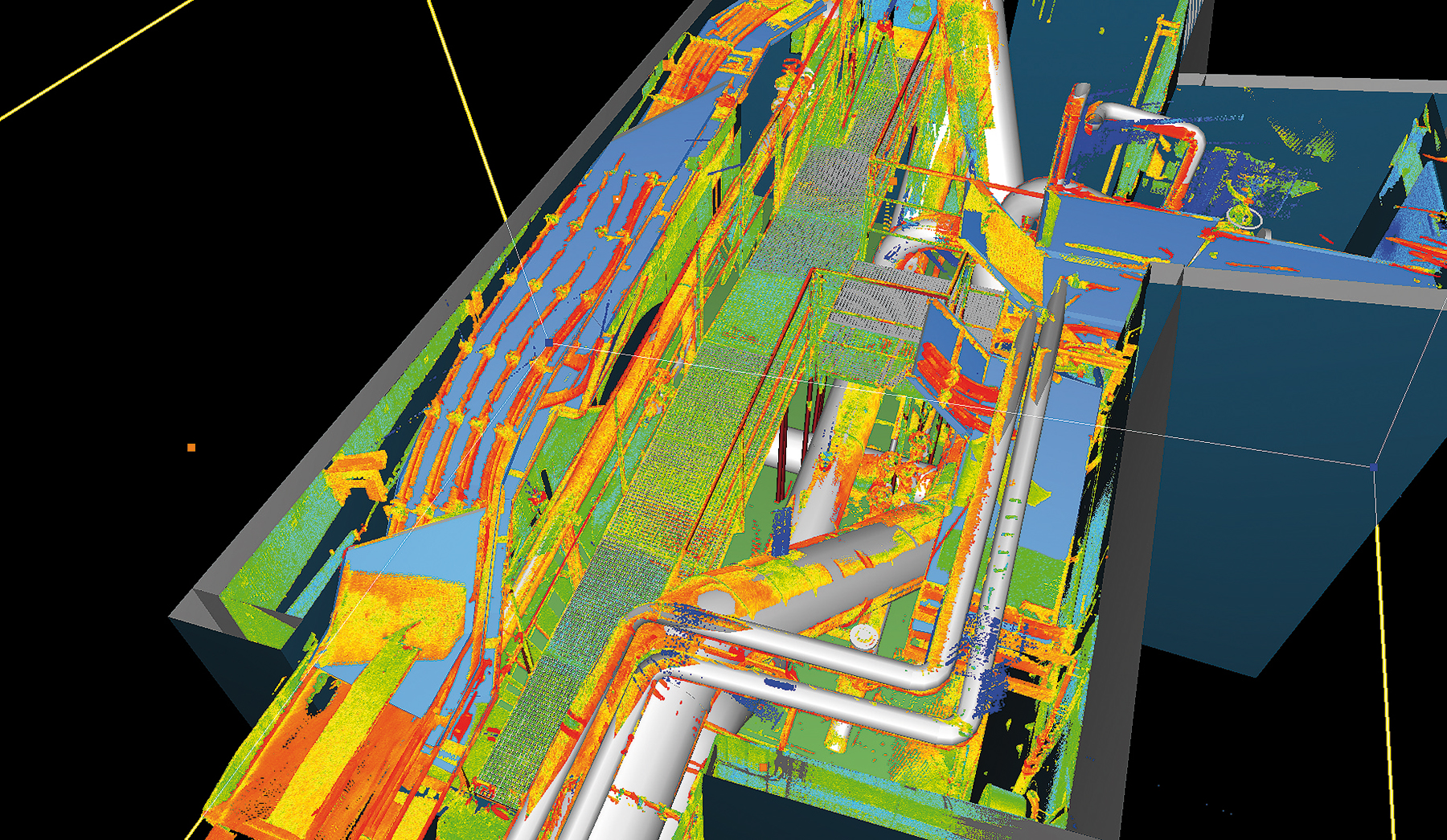
V roce 2016 společnost INSET, s. r. o., realizovala zaměření skutečného provedení kolektorové galerie G3 v Brně. Zároveň bylo provedeno prostorové a tvarové zaměření technologií a příslušných pochozích částí. Sledovaná kolektorová galerie měla půdorysné rozměry 20 × 15 m a obsahovala potrubní produktovody (teplá a studená voda) a kabely. Kabely byly uloženy na kabelových nosnících, pokrytých deskami. Pochozí část byla tvořena ocelovou trubkovou konstrukcí a na ní navěšenými kovovými rošty (obr. 1).
Obr. 1 Kolektorová galerie
3D laserové skenování
Po vizuální prohlídce předmětného objektu kolektorové galerie bylo nutné upustit od klasického postupu měření, tj. geodetického trigonometrického měření. Tato metoda by vzhledem ke složitosti sledované konstrukce galerie (množství technologií uvnitř zájmové stavby) nebyla proveditelná jak z časového hlediska, tak i z nemožnosti splnění požadavku na přesnost zpracování a na opakovatelnost případného dalšího měření – respektive ověření. Vzhledem k výše uvedenému bylo rozhodnuto použít technologii 3D laserového skenování. Tato technologie umožňuje přesně a rychle prostorově určit bezkontaktní metodou pomocí 3D skeneru až 1 000 000 bodů za sekundu s hustotou měřených bodů v řádu prvních jednotek milimetrů. Ve spojení s dostatečnou paměťovou kapacitou použitého přístroje je pak možné v reálném čase zaznamenat prostorový digitální otisk sledovaného objektu tvořený mračnem v řádu stovek milionů bodů.
Při použití metody 3D laserové skenování bylo důležité pokrýt skenováním veškerý prostor galerie, včetně umístěných technologií a pochozích částí. Cílem bylo vytvořit 3D model objektu, který by se co nejvíce blížil skutečnosti, respektive splnil požadovanou přesnost zaměření. V tomto konkrétním případě byl objekt naskenován celkem ze šesti stanovišť navzájem propojených polygonovým pořadem. Připojení 3D skenování do souřadnicového systému S-JTSK bylo provedeno klasickým měřením za využití totální stanice Leica MS-50. Připojovací body v systému S-JTSK byly v galerii prezentovány jako černobílé terče.
Samotné skenování bylo prováděno pomocí pulsního 3D skeneru Leica P-40. Z každého ze šesti vrcholů polygonového pořadu bylo pořízeno mračno bodů s krokem 3 mm / 10 m, se zorným polem podél vertikální osy 360° a podél horizontální osy 56°/90°. Při zvolené hustotě šesti vrcholů se podařilo nenaskenovaná místa pod skenery nahradit body ze sousedních stanovišť. Doba observace na jednom stanovisku včetně připojení do systému S-JTSK trvala cca 40 minut.
Naměřená data byla následně vyhodnocena v softwarovém komerčním programu Leica Cyclone. Nejprve byly vypočteny vrcholy polygonového pořadu v místním souřadnicovém systému, následně byl polygonový pořad vyrovnán. Velké množství bodů, které byly pořízeny z jednotlivých stanovišť a navzájem se překrývaly, bylo využito k ideálnímu „dopasování“ jednotlivých mračen na sebe. Takto vytvořené mračno bodů ze všech stanovišť bylo následně transformováno do souřadnicového systému S-JTSK. V posledním kroku byla jednotlivá mračna bodů spojena do jednoho konečného celku.
Vektorový model
Výsledné „prosté“ mračno bodů však nemusí být pro jednotlivé uživatele příliš vhodné, respektive uživatelsky příjemné. Jako dokumentace skutečného stavu stavby je více než dostačující, ale pro další zpracování není příliš vhodné. Pokud chceme výsledné mračno bodů dále využívat, například pro měření délek, projektování, modelování a analýzu vztahů mezi jednotlivými objekty, je nutné vyhotovit tzv. vektorový model. Ten se skládá ze 3D elementů, jako např. válců, kuželů, 3D extrudovaných ploch a dalších prvků.
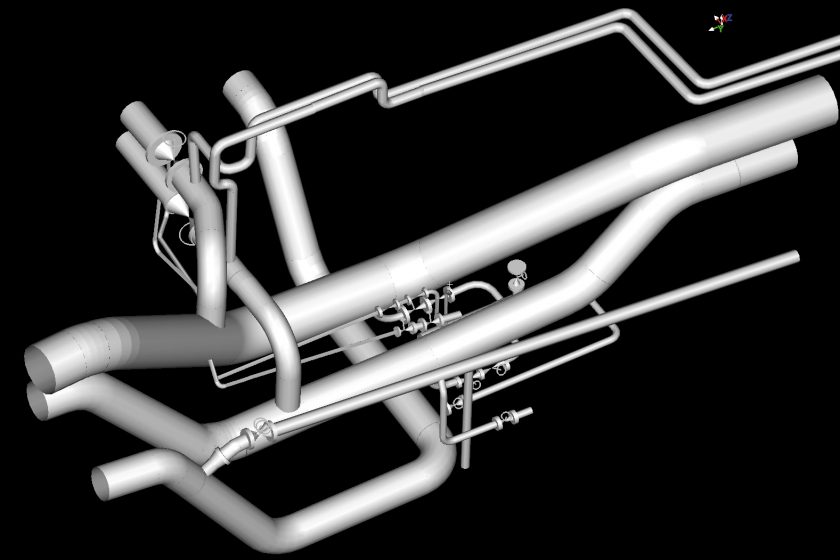
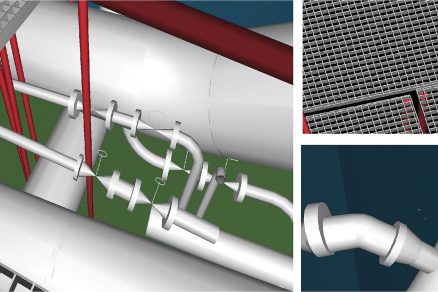
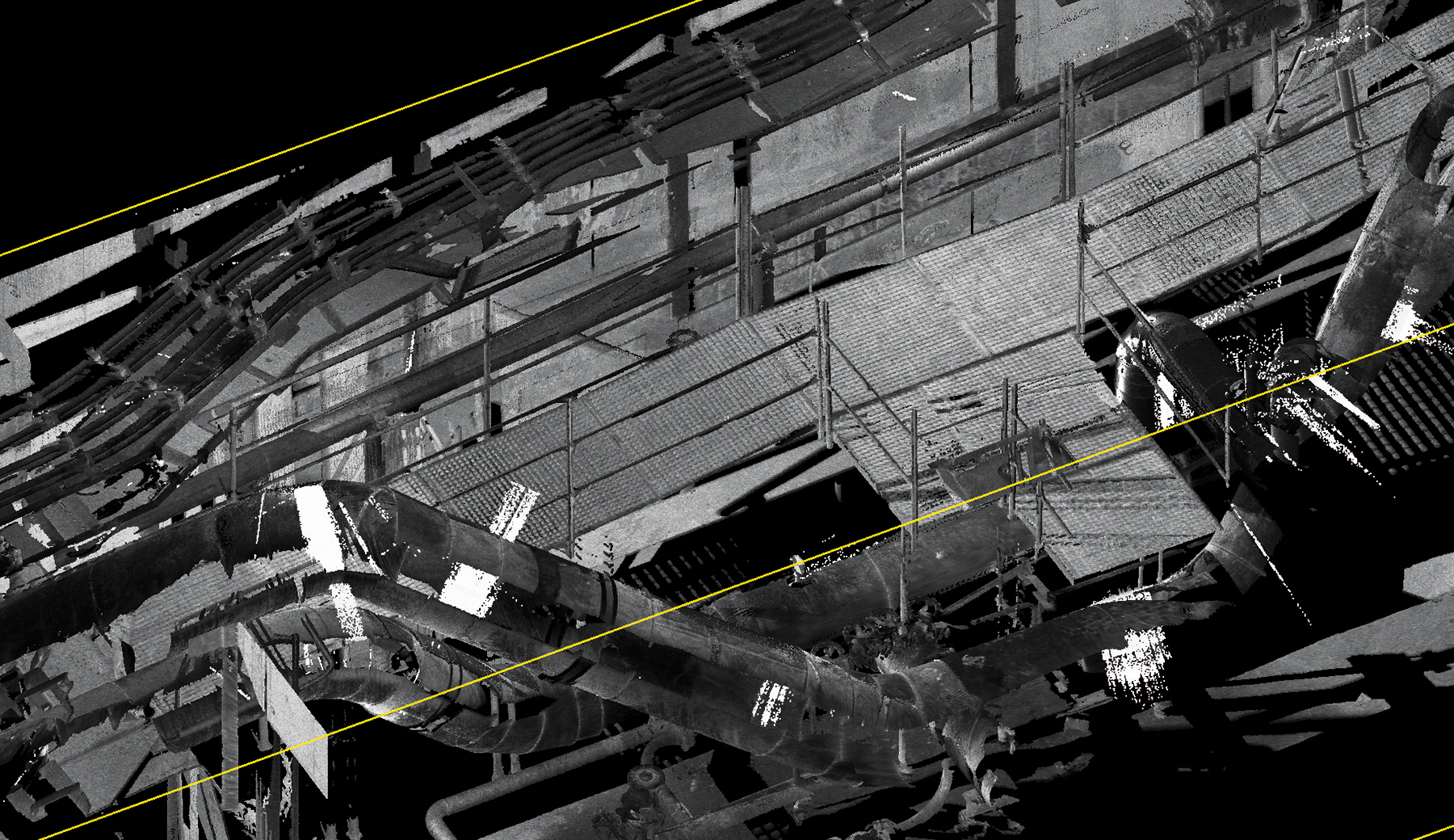
Vektorový model byl vytvořen také pomocí programu Leica Cyclone. V prvním kroku byl nejdříve zvolen vhodný místní souřadnicový systém pro vlastní modelování. V našem případě byl umístěný rovnoběžně a kolmo na hlavní stěny galerie. Následně bylo započato s modelováním trubního vedení (obr. 2).
Obr. 2 Příklad modelování trubního vedení
Po založení srovnávací hladiny a pomocí filtrace mračna bodů byly zobrazeny jednotlivé elementy trubního vedení. Následně byly použitým softwarem převedeny na válce. V rámci použitého programu je také možné do trasy jednotlivých technologií dosazovat konkrétní prvky (například kolena, redukce či ventily), a to jak zcela automaticky, tak i poloautomaticky. Zároveň je možné tyto prvky doplňovat i zcela manuálně.
Automatický režim použitého softwaru je tak pokročilý, že dokáže identifikovat trubní vedení na celém projektu (stavbě) a následně je automaticky převede na konečné 3D elementy. To například znamená, že není nutné mít trubní vedení zaměřené celé, stačí pouze jeho významné nebo lomové části. Pro tento automatický režim modelování je také zcela dostačující zaměření pouze jedné poloviny vedení. V poloautomatickém režimu je možné zadat například průměr trubního vedení a software následně doplní celý potrubní objekt.
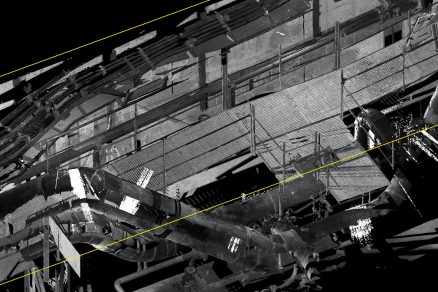
Samozřejmostí je také použití mnoha přiložených knihoven s předdefinovanými materiály pro následné modelování přesné konstrukce. Poloautomatický režim modelování vlastních technologií byl použit i v našem konkrétním případě. Element trubek byl označen a převeden s hodnotou průměru trubního vedení. Ručně optimalizovány byly prvky jako koleno, redukce a ventil (obr. 3). Ventil byl také často modelován ručně za pomoci ploch extrudovaných do 3D prostoru. Následně byly modelovány nosníky kabelů.
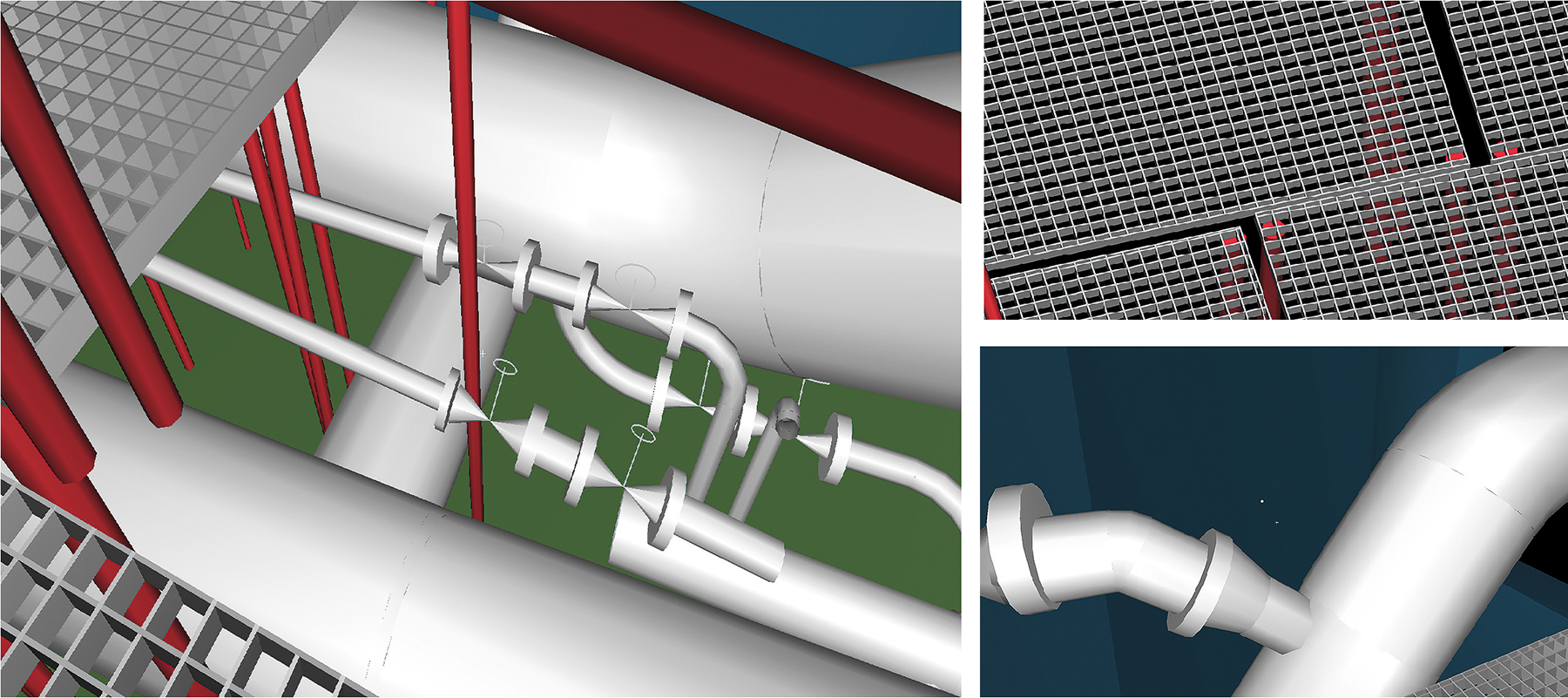
Obr. 3 Model redukce a ventilu – na malých obrázcích vidět rošt a redukci.
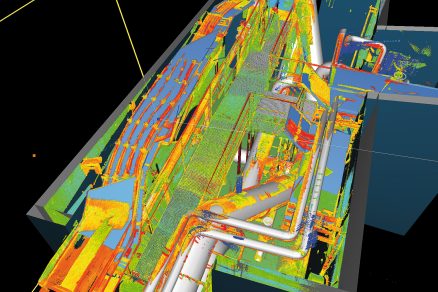
V rámci řešení vektorového modelu byl filtrováním mračna bodů pro digitalizaci nosníků získán jejich průběh a tvar. Správným nastavením prahu tolerance měření se jednotlivé plochy optimálně přimykaly na vektorové modely a následně vystihovaly skutečné prostorové provedení nosníků kabeláže. Po přidání výšek jednotlivých desek byly nosníky domodelovány do konečné podoby. Poté byly modelovány pochozí části galerie. Ta byla tvořena jednotlivými rošty upevněnými na železné trubkové konstrukci. Pro svoji jednoduchost byly použity stejné postupy jako při digitalizaci trubního vedení. Jednotlivé rošty byly vymodelovány z měřených mračen bodů a po přidání hloubky došlo k vytvoření virtuálního 3D modelu reálného roštu (obr. 4).
Obr. 4 Virtuální 3D model
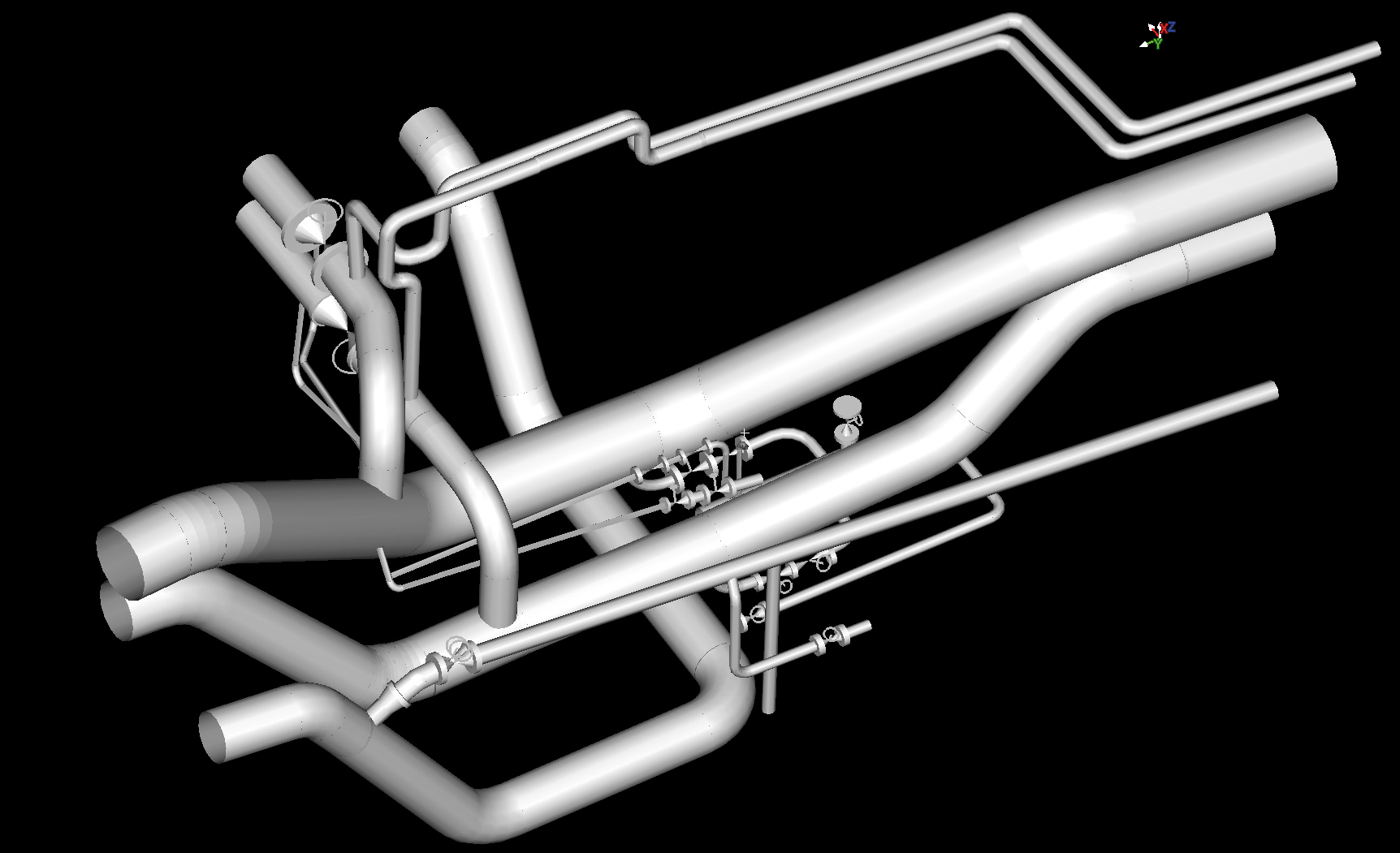
Na závěr byly modelovány stěny a strop samotné galerie. Postup byl stejný jako v případě nosníků s vedením kabeláže. Proložením rovin mračnem bodů byla získána plocha, která byla následně upravena ořezem podle hran jednotlivých stropních poklopů nebo dveří umístěných ve stěnách. Prostým přidáním šířky zdí byl vymodelován 3D prvek, který zachycoval skutečný stavební stav galerie v tzv. vektorovém modelu (obr. 5).
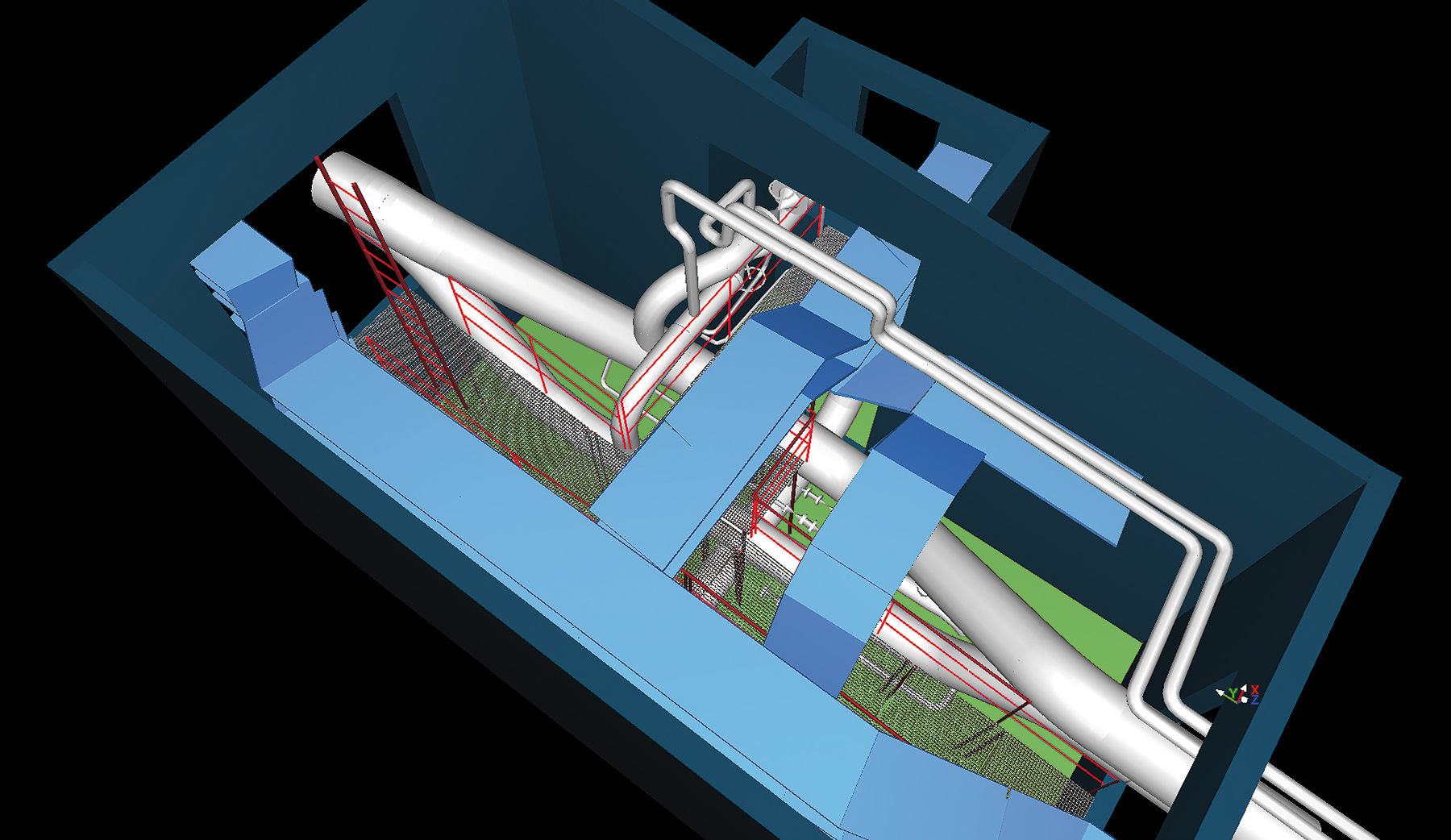
Obr. 5 Výsledný vektorový model
Závěr
Pro dokumentaci skutečného stavu kolektorové galerie bylo využito 3D laserové skenování. Po digitalizaci zájmové stavby, včetně jejích jednotlivých technologických prvků, bylo nutné výsledný model převést do uživatelsky příjemnějšího prostředí tak, aby investor byl schopen s modelem dále pracovat. Standardně používaný software funguje bez nutnosti zakoupení licenčního klíče pouze jako prohlížeč s omezenou sadou funkcí. Pro převedení modelu do častěji používaného softwaru AutoCad (například preferované formáty dwg nebo dxf) bylo využito celkem jednoduché řešení. Na straně AutoCadu stačí instalovat volně dostupný plugin od firmy Leica a model importovat ve formátu COE. Zároveň byl použit volně dostupný program Bently Map Viewer pro následné převedení formátu dwg nebo dxf do formátu pdf (prohlížeč AcrobatReader DC).
Od partnerů ASB

The documentation of the real state of the collector gallery using the 3D laser scanning method
Vertiginous development of new technologies it currently allows more sophisticated capture the actual state structures. It is almost unimaginable what options are open to us. This condition can be monitored in each area and not just in the construction industry. Since the diagnosis of buildings and structures, geotechnics, geophysics and after surveying the increasingly technology uses 3D laser scanning. This method ensures us required accuracy especially when documentation of the actual state of the structure, but also enables us to repeatability which is for example in the monitoring of the works or possible litigation more than desirable.
TEXT: Bc. Jiří Švanda, Ing. Miroslav Brtna, Ing. Oldřich Franc
OBRÁZKY: INSET, s. r. o.
Jiří Švanda, Miroslav Brtna a Oldřich Franc jsou hlavní geodeti ve společnosti INSET, s. r. o.
Článek byl uveřejnen v časopisu Inžinierske stavby/Inženýrské stavby 6/2017.